蛇ロボット(1)
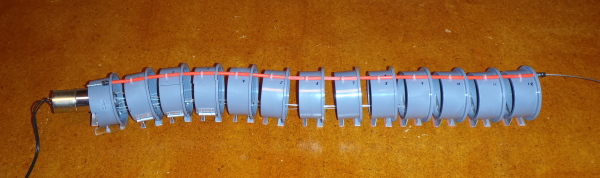 |
駆動部(左側)から6節くらいまでは想定通り動いているがその先は動きが悪い
庭で見た青大将の進み方を観察して、ヘビ型ロボットを作ってみようと考えた。
前にも書いたが蛇の進み方は4種類にあるようだ。
1、 蛇行運動
2、 アコーディオン運動
3、 横ばい運動
4、 直進運動
 |
蛇の骨格標本、肋骨の多さがわかる |
このうちの直進運動が金網を縫って進むときに青大将のやっていた方法だ。
青大将は木登りが得意な蛇で5m位の高い木の葉の上に登っているのを見たことがある。
太い木に登るときも巻き付くのではなく直線的に登っていた。
庭で見た青大将は金網からお隣のジンチョウゲの小枝の中にスーッと渡っていった。
調べてみるとヘビ型ロボットを研究しているところは思った以上に多かったがこの直進運動で移動するタイプは少ない。
だが、小さい隙間や瓦礫の間などを移動するためには最も効果的な移動手段になる。
蛇行運動は蛇らしくて面白いが実用上はやはり直進運動だろう。
 |
左の斜板機構からピアノ線が伸びる |
実際の蛇はたくさんの肋骨(200〜400本)と腹板(下面の鱗)を筋肉で動かすことで進むという。
簡略化するにしても機械で実現するのはなかなか難しそうだ。
まず、コーナンやカインズなどのDIY店で使えそうな材料を探した。
ヘビの肋骨に相当する部分は塩ビ配管部品、背骨は直径2mmのワイヤーとプラスチックパイプの組み合わせとする。
腹板はアルミアングルにゴムで滑り止めを付けた。
実物のヘビのように肋骨それぞれに動力を付けて肋骨を順序に動かせばいいのだが装置と制御が大変だ。
そこで纏めて斜板機構(スワッシュプレート機構)で駆動することにした。
 |
頭部側から後部を見た内部構造 |
駆動部を後方にして各肋骨までの力の伝達は頭部側のスプリングで張力を与えた細いワイヤーである。
肋骨6本を1セットとして2セット、12節、全長約80cmの蛇ができた。
テストしてみると予想していた通りワイヤーを引くための6本のスプリングの張力に負けて全体が座屈する。
そこで2号機としてワイヤーに替えてピアノ線での押引きに改造した。
これで反力は相殺されて座屈はなくなったがうまく動くのは6節ぐらい迄。
次の6節になると動力部から遠過ぎて動きが鈍く全体としてはほとんど進まない。
ピアノ線を太くすれば解決するが次の段階として上下左右に曲がって自在に進むことが必要だ。
そのためにピアノ線はあまり太くしたくない。
結局、個別に節を駆動することがさらに高度な動きをさせるために必要と判断した。
ということは本格的な蛇ロボットとして最低でも10〜30台程度の小型モータを制御することになる。
Arduino(アルドゥイーノ)という親父の頭でも何とか使えそうなロボットの開発環境がある。
しばらくこれを勉強することになりそうだ。