自動運転車は“譲り合い”が出来るのだろうか?
ニュースなどでは数年後には自動運転車が市販されそうな報道ですが、その時、問題なく走らせられるのでしょうか? 最近、思いついた事が気になるので書かせていただきます。
僕は たまに山道にドライブに行くのですが、時に“車では すれ違うことができない道”と 言う道に出くわします。対向車があれば当然 譲り合わないといけません。その様な時、自動運転車は上手く対処できるでしょうか?
“譲り合わなければならない道”をスムースに走るコツは「どこですれ違うか?」を常に考えなが走ることです。「今、対向車が来たら此処でならすれ違える。」、「次はあそこ。」と道幅に余裕のある場所を見つけながら、覚えなが走ることです。
「覚えながら?」 覚えておくことも大事です。自車と対向車の間にすれ違える場所が無かったら、さっさと覚えている道幅のある所までバックしてしまった方がスムースに抜けられることもあります。
さらには、前を走る車があれば「あの車はどこですれ違うのだろう。」と 予想することもします。道幅に余裕のある部分が1台の長さ程しかなければ、手前の余裕のある場所で待ったり、そんな所もなければ対向車のドライバーさんには申し訳ないですけど こちらが先に進んで待ってもらったりします。そういった、予測・総合的判断という物が大事です。
慣れていらっしゃらないドライバーさんは とにかく前へ突っ込まれるので、結局、「ジリジリと進んですれ違わなければならない。」という様な状況になるのです。
自車が通れるかどうかだけではなく「相手はどうするつもりだろう」という判断も必要です。
自動運転の車は果たして上手く対処できるでしょうか
この状況にコンピューターが対応するのは結構難しいかもしれません。上手く対処するためには予想すると言う事をしなければなりません。単に前の道幅で自車が通れるか? と言う予測だけではではなく「前の車はどうするだろう」、「対向車はどうするだろう」と言う予測も必要です。さらには、相手のドライバーさんの技量を観る。相手のドライバーさんの性格、「突っ込んでくる人」なのか、「待ってくれる人」なのか、というのも判断しないといけなくなります。
「この状況ならバックをした方が早い。」という判断、果たして自動運転車はできるでしょうか? そもそも、「道を譲るためにバックする」ということはプログラムされているのでしょうか?
こんな時、あなたはどうします?
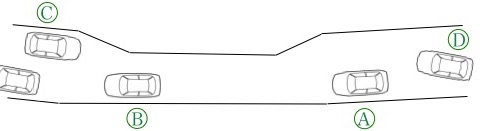 右の図を見てください。あなたはA車として此処に差し掛かりました。先行の車Bがあり、対向車Cが待っている様です。そして道幅の狭い部分は そこそこの長さがあるとします。当然、道幅の狭い部分ですれ違えません。先行のB車はもう狭い場所を抜けようとしています。C車はまだ進入できません。B車の前には先行車もありC車のドライバーさんは ずいぶん待たれていた様です。
右の図を見てください。あなたはA車として此処に差し掛かりました。先行の車Bがあり、対向車Cが待っている様です。そして道幅の狭い部分は そこそこの長さがあるとします。当然、道幅の狭い部分ですれ違えません。先行のB車はもう狭い場所を抜けようとしています。C車はまだ進入できません。B車の前には先行車もありC車のドライバーさんは ずいぶん待たれていた様です。あなたはどうします? 「ラッキー」とばかりに狭い部分に進入しますか? でも、それだと多分C車のドライバーさんは気を悪くされますよね? 「えっ、『そんなの気にしない。』? 」いけませんね。譲り合いというのは文化です。自分がその文化を守らなければ 他人が守ってくれる筈もありません。今度は自分がC車の立場になるかもしれませんよ。
余談ですが、これは僕が体験した実話です。この図の様な状況で 僕はA車として そこに差し掛かりました。「突っ込めば早く抜けられるけどC車のドライバーさんに悪いな。」と思ってこの位置で待っていました。 そうすると後ろからD車が現れて僕の車を追い抜いて狭い部分に進入していきました。あと もう少しで抜けられるという所で、C車が進入して来て D車は押し返されてスゴスゴとバックで下がってきました。そう C車は「ベンツ様」でした。いや~、流石に黒塗りではなかったですけどね。 気まずい思いをしないためにもマナー良く運転しましょうね。少なくとも前に車がブレーキを踏んで止まっていたら“どうして そこで止まっているのか?” くらいは考えましょう。
え~、話を元に戻して……
果たして自動運転車はこの様な状況に対処できるでしょうか?
コンピューターがこの状況を理解するには結構難しいと思います。「C車がすれ違いを待っているのか、単に止まっているだけなのか?」それをコンピューターが推測するのは難しいですね。つまり、外形だけでは「待っているのか?・駐車しているのか ?」なんて判断できないじゃないですか。 人にそれが出来るのは“無意識でいろんな事を総合的に判断している”からだと思います。単に「そこに車が止まっている。前の道は自車が通れるだけの幅はある。」と言う判断だけでは、スムースに車を運転する事はできないのです。直前には自車が通れる幅があっても、相手も進入してきたら“どん詰まり”になってしまいます。モタモタしていて 次々と後続車が来てしまったら 二進も三進もいかなくなります。 長らく待たされている対向車のドライバーさんの気持ちも理解しないと「いつまで待っていなきゃいけないんだ!!」と、無理を承知で侵入して来られるかもしれません。 単に道幅と自車の幅のだけの判断だと 先に話した「山道に慣れていらっしゃらないドライバーさん」の様に道幅の狭い部分でジリジリとすれ違うことが多発します。“どん詰まり渋滞”も発生します。
果たして自動運転車は“譲り合い”をプロクラムされているでしょうか? そもそも、開発者は“譲り合い”をプログラムしようとしているでしょうか? 東京の様な都会では“すれ違うのに困る”様な道は無いのかもしれませんが、僕の住む田舎ではそんな道はザラにあります。「そんな道では自動運転車は走らせるな。」という事でしょうか。
しかも単に「交互に進入すれば良いだろう。」……
では済みませんしね。いぇ、良いんですよ。でも、時間がかかるでしょ。“様子を見ながら数台づつ”と言うのが、「まぁ、スムースに捌けるしドライバーさんのイライラも抑えられるし……」位で。さぁ、それですよ。この「何となく、これ位。」と言うのはコンピューターには難しいですね。“数値による厳格なルール”は得意でも、“これ位かな?” というのはコンピューターは苦手ですからね。
それには人の心理を推測することも必要になります。つまりC車のドライバーさんのイライラを理解する必要があります。
なんか 自動運転車の開発テストって……
整えられた状況でしか実施されてないですよね~。問題を起こさずにテストを済ませるためには整えられた状況でテストするのが良いんでしょうけど、それに何の意味があるんでしょうね。 開発の初期段階なら、「とにかくコンピューターが車を走らせられるのは分かった。」と、それでも良いんですけど、もう 「数年後には市販しようか。」 と言う段階でしょ。もっと、「人間でも躊躇する。」と言う様な厳しい条件でテストしないと……。 “コンピューターに車を運転させる開発”に集中するあまり、「こんな時、コンピューターはどうするのだろう。」とか「人はどんな風にしているのだろう。」と想像したり観察したりしていないんでしょうね。米グーグル社は何十台ものテスト車を走らせて実験しているそうです(「NHKスペシャル」より)。テストとしてはそれが正解ですね。ほとんどコンピューター ソフト開発の“バグ出し作業”の様なものだと思います。
「“開発者が想定した状況”を自動運転車がこなせられるか?」というテストではなくて、「開発者も想定していない コンピューターには対処が難しい状況をあぶり出す。」ためのテスト。それには とにかくいっぱい自動運転車を走らせて それに自動運転車を遭遇させ「コンピューターがどう対処したのか?」 を記録するためのテストが必要なんだと思います。
2018/10/03






